


Das Greifen von Objekten im virtuellen Raum ist noch immer ein ungelöstes Problem. Mit den Oculus Touch Controllern und den Controllern der HTC Vive, fühlt sich das Aufnehmen eines virtuellen Objektes noch nicht realistisch an. Einige Unternehmen arbeiten an einer Lösung, doch noch keine Lösung ist für den Konsumenten verfügbar. So arbeitet beispielsweise Dexta Robotics bereits einige Jahre am Dexmo Handschuh, der eure Finger von hinten greift und festhält. Nun ist ein neuer Prototyp aufgetaucht, der ein anderes Prinzip verwendet und der aktuell auch wirklich noch stark nach einem Prototypen aussieht.
Wolverine

Inrak Choi hat mit seinen Kollegen der Stanford Universität ein neues Eingabegerät für die Virtuelle Realität entwickelt und das Team bezeichnet den Prototypen als den “Wolverine”. Dieses Eingabegerät soll ein realistisches Gefühl beim Greifen von Objekten vermitteln.
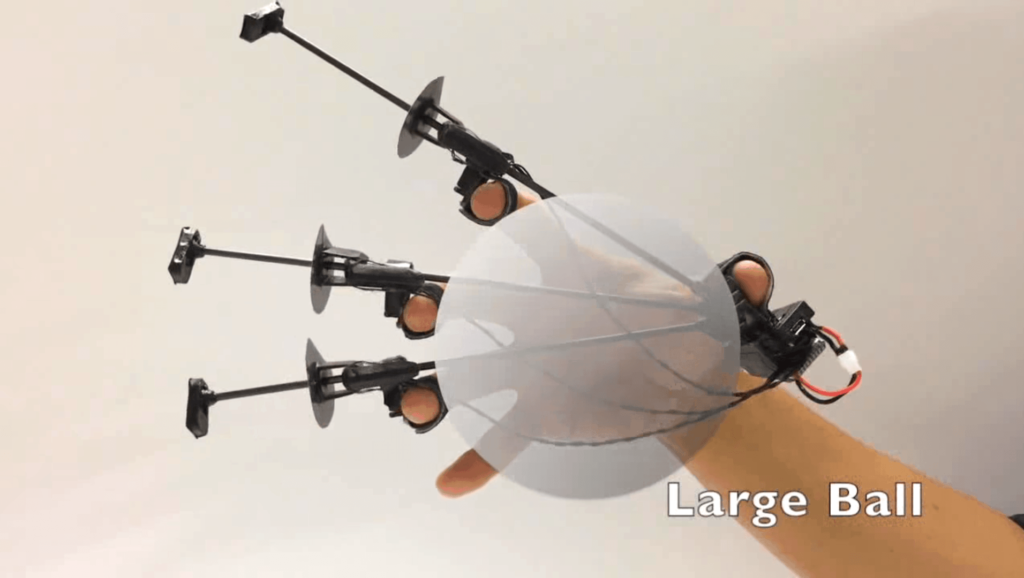
Der Wolverine Controller wird an der Hand fixiert und der Daumen und drei Finger werden mit kleinen Ringen am Controller befestigt. Wenn man zugreifen will und ein virtuelles Objekt in der Hand ist, dann wird ein Widerstand erzeugt, der uns glauben lässt, wir würden gerade wirklich das Objekt greifen oder zusammendrücken. Das Prinzip ist dabei denkbar einfach. Die Finger werden an Schienen geführt an diesen Schienen sind mit Bremsen ausgestattet. Diese Bremsen werden dann aktiv, wenn das virtuelle Objekt eure Finger berühren würde. Das verwendete System zum Bremsen der Finger soll dabei besonders wenig Strom verbrauchen und dadurch könnte der Controller auch lange im Einsatz sein, ohne ständiges nachladen. Zudem wird der Controller einfach per Bluetooth verbunden und soll extrem leicht sein. Auch wenn das Gerät sehr unkomfortabel aussieht, so soll es sich doch angenehm tragen lassen.
Aktuell ist der Prototyp dennoch nur ein Blick in die Zukunft und das Gerät wird in einer solchen Form wohl nie auf den Markt kommen.